ИСПОЛЬЗОВАНИЕ ИННОВАЦИОННОГО ПОТЕНЦИАЛА
УНИВЕРСИТЕТА В ОБЛАСТИ ИНФОРМАЦИОННЫХ ТЕХНОЛОГИЙ ДЛЯ РАЗВИТИЯ СРЕДСТВ ПОДГОТОВКИ МАШИНОСТРОИТЕЛЕЙ
Мазеин Петр Германович (mpg2@mail.ru)
д.т.н, профессор
Савельев Алексей Алексеевич
Южно-Уральский государственный университет, г. Челябинск
Аннотация
Рассмотрены виды образовательных ресурсов, созданных в Южно-Уральском государственном университете с использованием современных информационных технологий для подготовки машиностроителей: анимационные ролики, компьютерные имитаторы и тренажеры, 3D модели, учебное оборудование с компьютерным управлением.
USAGE OF INNOVATIVE POTENTIAL OF UNIVERSITY IN THE FIELD OF THE INFORMATION TECHNOLOGY FOR DEVELOPMENT OF RESOURCES OF PREPARATION of MACHINE ENGINEERS
Mazein Peter Germanovich (mpg2@mail.ru),
Savelyev Alexey Alekseevich
South-Ural state university, Chelyabinsk
Annotation
Are considered sorts of the educational resources created at the South Ural state university with usage of a modern information technology for preparation of machine engineers: animation rollers, computer simulators and training apparatus, 3D models, the educational equipment with computer handle.
Профессиональная подготовка машиностроителя включает дисциплины, требующие для их освоения использование всех видов образовательных средств, в том числе, информационных технологий в виде 3D моделей технологического и вспомогательного оборудования, компьютерных имитаторов и тренажеров, анимационных и видеороликов, а также специального учебного оборудования с компьютерным управлением. В Южно—Уральском государственном университете (ЮУрГУ) создаются следующие учебные средства: 3D модели оборудования с ЧПУ и их узлов, анимационные ролики по технологическим процессам и станкам с ЧПУ, компьютерные имитаторы станков и устройств с ЧПУ, реальные настольные станки с ЧПУ, роботы, ГПС, ГПМ, автоматизированные сборочные комплексы с транспортной системой и техническим зрением (рис.1-3). В создании этих учебных средств участвуют студенты 3-6 курсов, используя знания, умения и навыки, полученные как в результате программно читаемых дисциплин, так и самостоятельно осваиваемых программных пакетов.
Анимационные ролики по технологическим процессам и механизмам можно использовать при изучении курсов «Технология конструкционных материалов», «Технология машиностроения», «Оборудование машиностроительных производств» и «Оборудование автоматизированных производств». Компьютерные имитаторы (эмуляторы) устройств ЧПУ, станков с ЧПУ позволяют выполнить программирование и наладку станка, а также обработку виртуальной детали по введенной вручную или выполненной в CAM системе управляющей программе и используются для изучения программирования и наладки станков с ЧПУ, тренажа операторов и наладчиков станков с ЧПУ.
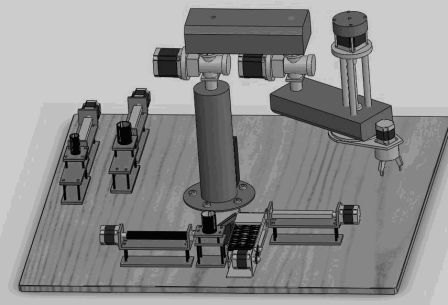
Рис.1. 3D модель роботизированной сборочной линии с техническим зрением
и числовым программным управлением
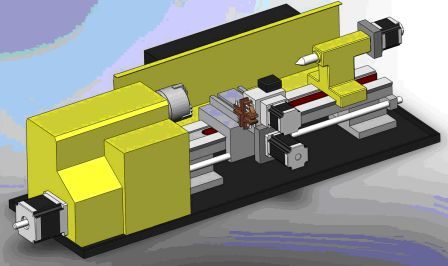
Рис.2. 3D модель токарного станка с числовым программным управлением
Наиболее полный комплект обучающих средств, кроме анимационных роликов, видеофильмов, 3D моделей и компьютерных имитаторов включает: настольные токарный и фрезерный станки с компьютерныыми системами ЧПУ, роботы различных типов, гибкие производственные системы, автоматизированные сборочные комплексы с техническим зрением и транспортно—накопительной системой, автоматизированный склад, универсальную систему тестирования знаний, систему технологического диагностирования управляющих программ и параметров устройств ЧПУ, комплект 3D моделей режущего инструмента и САПР сборных приспособлений.
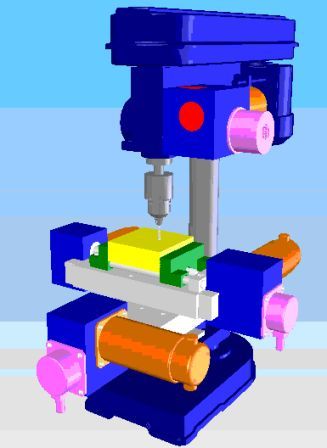
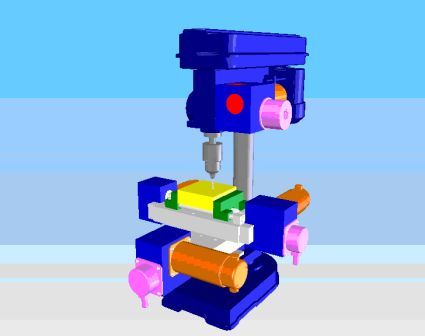
Рис.3. 3D модель сверлильно-фрезерный станок с числовым программным управлением
Учебное оборудование с современными системами ЧПУ класса PCNC используются в учебных заведениях для выполнения лабораторных и практических работ, а также для учебно-исследовательских и научных работ по точности, динамик, технологической надежности по станкам, технологии машиностроения, технологической оснастке, электроприводам, мехатронике и системам управления. Оборудование с компьютерным управлением выпускается в следующих вариантах: минифрезерные станки, настольные фрезерные станки, минитокарные станки, настольные фрезерные станки, роботы со сферической системой координат, роботы с цилиндрической системой координат, ГПМ на базе токарного или фрезерного станков (настольных или минигабаритных), робота и стеллажа-накопителя, ГПС на базе двух станков (настольных или минигабаритных), робота и стеллажа-накопителя, многопозиционный пресс, сборочные комплексы. Токарные станки имеют две одновременно управляемые координаты, программно управляемый привод главного движения и могут оснащаться устройствами автоматизированной смены инструмента и приводами пиноли задней бабки. Фрезерные станки имеют три или четыре одновременно управляемые координаты, программно управляемый привод главного движения и могут оснащаться устройствами автоматизированного зажима заготовок, а минифрезерные станки устройствами для сканирования. Роботы имеют три или четыре степени подвижности и могут функционировать автономно или в составе ГПМ, ГПС и сборочных стендов, а также оснащаться системами технического зрения. Дополнительно учебные стенды могут оснащаться: современными системами автоматизированного проектирования, в частности, CAD/CAM/CAPP системой ADEM и постпроцессором, системой управления от джойстика, системой удаленного наблюдения за рабочей зоной станков или робота, системами диагностирования СЧПУ и технологического диагностирования управляющих программ для станков с ЧПУ, системой сенсорного управления, системой тестирования знаний по оборудованию с ЧПУ, базой данных по станкам с ЧПУ, комплектом 2D и 3D моделей режущего инструмента, имитаторами пультов устройств ЧПУ Fanuc, Sinumerik, NC–110, комплексом САПР технологической оснастки с набором физических моделей универсально-сборных приспособлений, 3D моделями и видеороликами по оборудованию с ЧПУ. Все поставляемое оборудование снабжается компьютерными имитаторами и учебными пособиями, в которых имеются разделы по техническим характеристикам оборудования, электроприводам, системам управления и их интерфейсу, а также по программированию работы. В пособиях приводятся примеры программирования и особенности эксплуатации. Общая методика использования учебных комплексов и стендов предусматривает три основных этапа: изучение программирования и наладки на компьютерных имитаторах; изучение программирования и наладки на станках с компьютерным управлением; выполнение учебных и научных исследований.
Созданное оборудование используется для профессиональной подготовки кадров учебными заведениями всех уровней (лицеи, колледжи, профессиональные училища, учебные центры вузы), не уступает, а ряде случаев превосходит, зарубежные учебные стенды, обеспечивает качественную подготовку кадров, в том числе и научных.
Дисциплина «Технология конструкционных материалов» имеется в учебных планах практических всех тех технических специальностей и предназначена для ознакомления будущих бакалавров, специалистов и магистров со всеми переделами наиболее распространенных технологий изготовления деталей машин, приборов и устройств. Для лучшего понимания излагаемого материала и самостоятельной подготовки предлагается использовать анимационные и видеоролики по различным технологическим процессам, оборудованию и инструменту. Ролики выполняются студентами, изучающими «Технологию конструкционных материалов» при выполнении курсовых заданий.
Фрагменты разработанных анимационных роликов показаны на рис. 4, 5. Анимации выполнены многоцветными, подробно показывают в динамике описываемый процесс с необходимым замедлением.
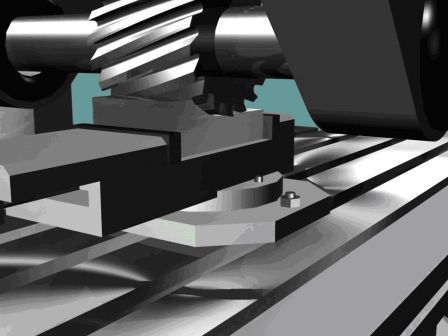
Рис. 4. Анимационный ролик «Фрезерование заготовки на горизонтально–фрезерном станке
цилиндрической косозубой фрезой» (фрагмент)
В настоящее время созданы анимационные ролики по токарной и фрезерной обработке, шлифованию, зубообработке, по токарным и фрезерным станкам, по их устройствам и узлам, в том числе, и станков с ЧПУ.
Дополнениями к анимационным роликам являются натурные видеоролики по станкам, инструменту, приспособлениям и технологическим процессам.
Наличие роликов обеспечивает качественное преподавание даже при отсутствии ряда оборудования в учебных заведениях, а также возможность изучения конструкции механизмов и устройств.
Так, например, процесс формовки и получения отливки невозможно продемонстрировать на лекции без показа всех их этапов на анимации. Для усвоения последовательности наиболее эффективного и рентабельного метода получения отливки в песчаные разовые формы анимация может даваться как поэтапно: установка опок, модели и литниковой системы; установка стержней; набивка полуформ верха и низа; трамбовка формовочной смеси; соединение полуформ; заливка металла, так и в целом объеме.
Процесс горячей объемной штамповки, при котором готовое изделие приобретает заданные форму и размеры путем заполнения полости штампа при деформации также поэтапно дается в анимационном ролике. Заготовкой при этом методе служит прокат различного профиля. В данном примере горячей объемной штамповки в закрытом штампе даны переходы: осадка; заполнение штампа; получение готового изделия.

Рис. 5. Анимационный ролик: «Процесс отливки заготовки» (фрагмент)
Трудный для понимания процесс формообразования заготовок методом штамповки на горизонтально-ковочной машине (ГКМ) хорошо усваивается с помощью анимации. Процесс получения готового изделия производится без облоя и штамповочных уклонов в разъемных матрицах. Исходным материалом служит пруток, разделяемый на мерные заготовки в отрезном ручье. Работа самой машины дается на кинематической схеме в стационарном варианте, а для понимания самого процесса штамповки в разъемных матрицах с помощью пуансона в одном ручье и в нескольких ручьях выполнен анимационный ролик, фрагменты из которого даны на рис. 12 – 16.
Для дисциплины «Технология конструкционных материалов» разработаны методические материалы по другим разделам машиностроительного производства, для представления материала по этим разделам используется также 3D модели и видеролики по станкам, в том числе по станкам с ЧПУ, а также по режущему инструменту.
Рабочие зоны роботов реализуются в сферической, цилиндрической и прямоугольной системах координат. Для управления роботами созданы компьютерные устройства ЧПУ с развитым пользовательским интерфейсом и и компьютерными имитаторами роботов, ГПМ, ГПС и сборочных стендов и комплексов. Для наладки и управления роботом имеются ручной и автоматический режимы, а также режим редактирования управляющих программ.
Изучение роботов, станочных и сборочных систем выполняется в несколько этапов:
- изучение конструкции, кинематики и электроавтоматики робота, программирование, наладка и запуск виртуального робота
- программирование, наладка и запуск реального робота
- изучение компоновки ГПМ (ГПС) и компьютерного имитатора ГПМ
- построение циклограммы работы ГПМ, программирование, наладка и запуск виртуального ГПМ
- программирование, наладка и запуск реального ГПМ.
В настоящее время заканчивается разработка робота--гексапода с 18 степенями подвижности, управляемого от компьютера. Робот предназначен для изучения динамики, кинематики роботов и сложных механизмов, моделирования устойчивости сложных автоматизированных систем, разработки алгоритмов поведения и адаптации. Система управления позволяет изменять, разрабатывать принципы перемещения в пространстве, алгоритмы преодоления препятствий, алгоритмы ходьбы, динамических пространственных разворотов. Шесть ног робота могут группироваться в 3 или 4 конечности (таким образом, происходит изменение кинематической схемы шагающего робота), что позволяет исследовать новые методы ходьбы и устойчивости. Оснащен интуитивно понятной системой управления от ЭВМ и автономным поведенческим модулем. Система управления выполнена с открытыми алгоритмами поведения, имеется ее виртуальная модель. Учебные роботы успешно применяются в вузах и колледжах, а также в профессиональных лицеях.
Таким образом, использование потенциального ресурса университета, создающегося на базе современных информационных технологий, способствует развитию как средств подготовки кадров для машиностроения, так и непосредственно обеспечивает высокий уровень конкурентоспособности выпускников ЮУрГУ и других учебных заведений, которые эффективно используют созданные учебные средства.
Разработан компьютерный имитатор пульта устройства ЧПУ Fanuc, которое достаточно широко применяется для оснащения как российских, так и зарубежных станков. Имитатор предназначен для тренажа навыков работы с данным УЧПУ, например, при использовании имитатора Stepper для управления и визуализации обработки.
Кроме того, т.к. дисциплина «Технология конструкционных материалов» содержит много разделов машиностроительного производства для успешного представления материала по этим разделам используется также серия слайдов, выполненных в программе PowerPoint, дающих представление: о методах получения заготовок; конструкциях станков (моделей как традиционных так и современных с ЧПУ, многооперационных); режущем и специальном инструменте.
|
