Образовательный кибернетический конструктр для школ и вузов.
Сборник трудов конференции в формате Adobe Acrobat (4 Мб)Элементы робототехники и кибернетики всё чаще применяются для обучения различным дисциплинам, как в школах, так и вузах. Возможность создать собственного робота и запрограммировать его вызывает живейший интерес у молодых людей, начиная с младших классов. Стремительно растет количество соответствующих кружков, соревнования по робототехнике собирают большое число участников и зрителей. Подобный процесс исключительно необходим для формирования в обществе навыков использования новых технологий и развития технического творчества молодёжи.
Микроминиатюризация и удешевление электронных устройств позволили превратить виртуальных роботов в материальные, что ещё больше повысило интерес детей к их программированию. Во многих школах образовались кружки робототехники, проводится множество соревнований, вплоть до международных, словом, интерес к роботам огромный.
Таким образом, назрела идея создания нового конструктора, существенно превышающего по возможностям существующие аналоги, который можно было бы применять сквозным образом, в цепочке: младшие школьники –> старшие школьники –> студенты техникумов и колледжей –> студенты вузов –> промышленное прототипирование.
Что бы построить такую цепочку необходимо выполнить три фундаментальных условия:
- Создать образовательную программу дополнительного образования детей, ориентированную на овладение современными технологиями и инновациями. При этом методика должна помогать раскрывать на практике знания, полученные на разных предметах, тем самым сохраняя фундаментальность образования.
- Использовать открытое кроссплатформенное программное обеспечение, желательно, российского производства: важно предоставить возможность подстраивать ПО для образовательного процесса, а не наоборот, и очень важный маомент -- качественная локализация.
- Создать образовательный кибернетический конструктор на российской элементной базе.
Следует отметить, что любой из известных робототехнических наборов не обладает вышеперечисленными техническими и образовательными характеристиками. Поэтому на математико-механическом факультете СПбГУ приступили к разработке такого конструктора с нуля.
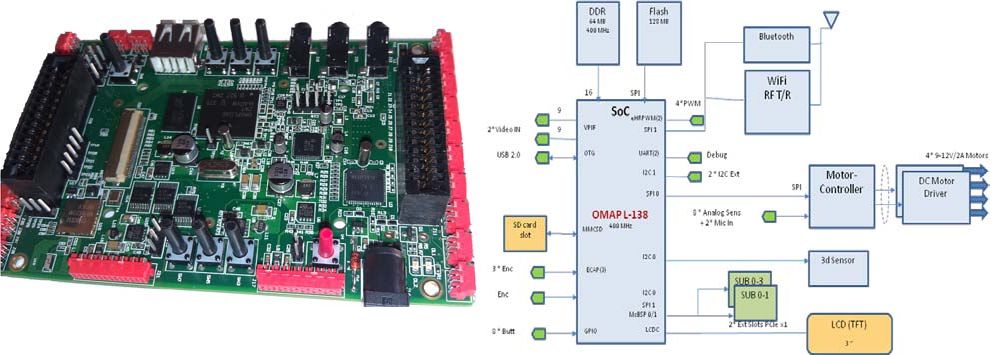
Рис. 1. Плата контроллера
Ключевую роль в этом играло создание контроллера (Рис.1). Это должен был быть современный чип, обладающий богатыми функциями, например, обработки аудио/видео сигналов, работа по сети wifi и т.д.. По-настоящему кибернетическим, конструктор делает возможность сосредоточить внимание на алгоритмах анализа и управления. Для этого хорошо подходит метасредство визуального программирования QReal (Рис.2). Это позволяет создать спектр языков программирования, обеспечивая полностью образовательный процесс. Завершающим этапом разработки была подготовка методических материалов, поставляемых вместе с конструктором, по которым учащийся имеет возможность самостоятельно освоить основные элементы робототехники и теории управления, а преподаватель вести уроки технологии и информатики в школе или практические занятия в вузе.
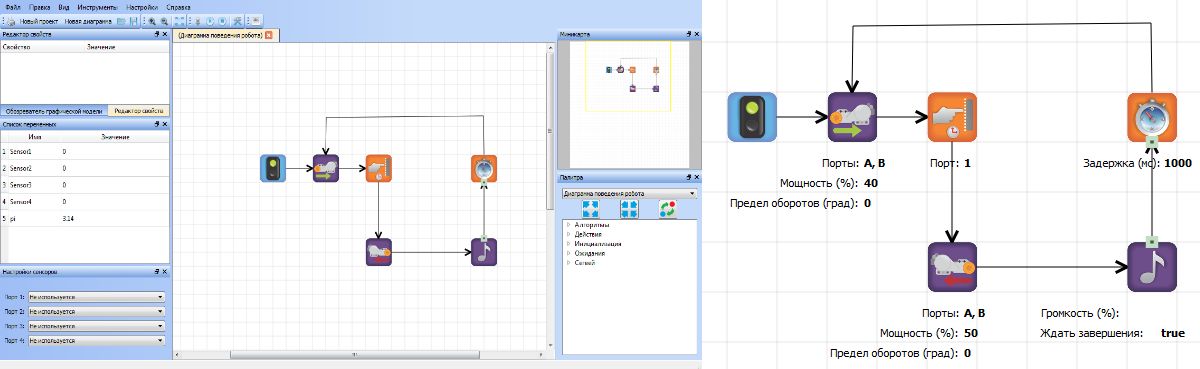
Рис. 2. Диаграмма QReal:Robots
Очевидно, что данный конструктор может послужить основой для таких школьных и университетских проектов, как создание комплекса автономных робофутболистов или мульти-агентной группы БПЛА. Кроме того, возможности контроллера позволяют использовать его для научно-исследовательских проектов и промышленного прототипирования.
- Пейперт С. Переворот в сознании: Дети, компьютеры и плодотворные идеи. Москва, Педагогика, 1989.
- Филиппов С. А. Робототехника для детей и родителей. СПб.: Наука 2010.
- Филиппов С. А., Фрадков А .Л. LEGO-роботы в обучении мехатро¬нике и автоматизации в школе и вузе. // Тез. док. 7-й науч.-техн. конф. "Мехатроника, Автоматизация, Управление" (МАУ-2010), ГНЦ РФ ОАО "Концерн "ЦНИИ "Электроприбор", СПб, 2010. С. 49-52.
- Р.М. Лучин "Программирование встроенных систем: от модели к роботу.", Наука, СПб, 2011.
| Тип выступления | Устное выступление |
| Уровень образования |
Высшее профессиональное Послевузовское профессиональное Дополнительное образование детей Дополнительное образование взрослых |
| Ключевые слова | Обучение теории управления, управление роботами, программирование роботов, техническое зрение, промышленные установки. |
|
|








